Finding Colour Objects at PiWars¶
These are notes about attempting the Computer Vision (CV) for Eco-Disaster (Sort the Barrels) challenge for PiWars 2020. I am not competing in the competition this year so why am I looking at this? There was some chatter on Twitter about creating a "CVZero" library to help contestants with a simplified Computer Vision library. Secondly, I saw Brian Starkey's Computer Vision presentation at PiWars Mini Conference on what he had done last year without using a recognised CV library. So I attended the CVzero hackathon to see if I could help and learn some things along the way. After experimenting with different options and colour spaces, the experiment below looks to use the numpy library to try to capture the red, green, blue, and yellow objects of the Eco-Disaster challenge.
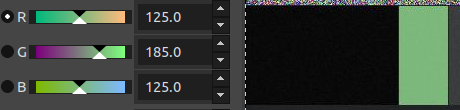
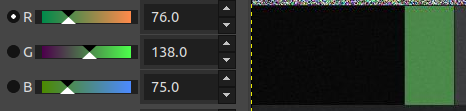
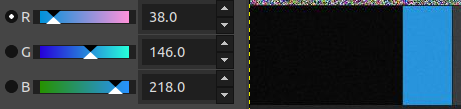
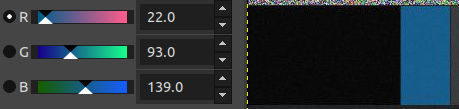
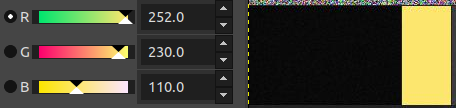
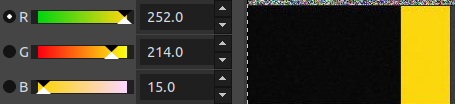
The general guidance is to not work in the RGB colour space because the RGB values for a colour (as shown in the image below) change dramatically depending on the lighting conditions.
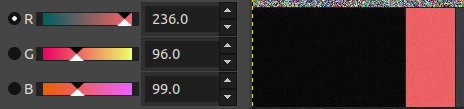
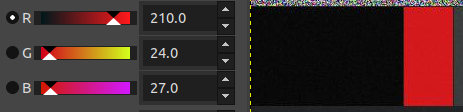
Looking at the relationship between the R, G, and B values, the ratios stay fairly static. This is also true for the different colours used in Eco-disaster when exposed to different levels of light:
import imageio
from glob import glob
import os
import numpy as np
import scipy.ndimage
# For visualising results only
import matplotlib.pyplot as plt
data_actual = os.path.join(os.getenv("TEST_DATA"), 'actual', 'scene*_160_120.jpg')
data_cgi = os.path.join(os.getenv("TEST_DATA"), 'cgi', 'my*.jpg')
files = sorted(glob(data_actual))
images = []
for file in files:
images.append(imageio.imread(file))
def blur_img(img):
return scipy.ndimage.gaussian_filter(img, 2)
def get_red(img):
return img[:,:,0]
def get_green(img):
return img[:,:,1]
def get_blue(img):
return img[:,:,2]
def red_mask(red_lay, green_lay, blue_lay):
# print('Red mask')
test1 = red_lay > 160
if np.any(test1):
test1 = np.less(np.clip(green_lay.astype('uint16') * 2, 0, 255), red_lay)
test2 = np.less(np.clip(blue_lay.astype('uint16') * 2, 0, 255), red_lay)
mask_red = test1 & test2
else:
mask_red = np.zeros(red_lay.shape, dtype='bool')
return mask_red
def blue_mask(red_lay, green_lay, blue_lay):
# print('Blue mask')
test1 = blue_lay > 100
if np.any(test1):
blue_lay[blue_lay==0] = 1
green_lay[green_lay==0] = 1
test2 = (green_lay / blue_lay) < 0.9
test3 = (red_lay / green_lay) < 0.8
mask_blue = test1 & test2 & test3
else:
mask_blue = np.zeros(blue_lay.shape, dtype='bool')
return mask_blue
def green_mask(red_lay, green_lay, blue_lay):
# print('Green mask')
test1 = green_lay > 80
if np.any(test1):
green_lay[green_lay==0] = 1
test2 = (red_lay / green_lay) < 0.9
test3 = (blue_lay / green_lay) < 0.6
mask_green = test1 & test2 & test3
else:
mask_green = np.zeros(green_lay.shape, dtype='bool')
return mask_green
def yellow_mask(red_lay, green_lay, blue_lay):
# print('Yellow Mask')
test1 = (red_lay > 120) & (green_lay > 120)
if np.any(test1):
red_lay[red_lay==0] = 1
test2 = (blue_lay / red_lay) < 0.6
mask_yellow = test1 & test2
else:
mask_yellow = np.zeros(red_lay.shape, dtype='bool')
return mask_yellow
plt.axis('off')
f, ax = plt.subplots(len(images), 5, figsize=(12,36))
# Step through test images and display mask for each colour
for row, this_img in enumerate(images):
red_c = blur_img(get_red(this_img))
green_c = blur_img(get_green(this_img))
blue_c = blur_img(get_blue(this_img))
rm = red_mask(red_c, green_c, blue_c)
bm = blue_mask(red_c, green_c, blue_c)
gm = green_mask(red_c, green_c, blue_c)
ym = yellow_mask(red_c, green_c, blue_c)
ax[row][0].imshow(this_img)
ax[row][0].set_title(row)
ax[row][1].imshow(np.invert(rm), cmap='gray', vmin=0,vmax=1)
ax[row][1].set_title('red mask')
ax[row][2].imshow(np.invert(bm), cmap='gray', vmin=0,vmax=1)
ax[row][2].set_title('blue mask')
ax[row][3].imshow(np.invert(gm), cmap='gray', vmin=0,vmax=1)
ax[row][3].set_title('green mask')
ax[row][4].imshow(np.invert(ym), cmap='gray', vmin=0,vmax=1)
ax[row][4].set_title('yellow mask')
plt.show()


def process_image(this_img):
red_c = blur_img(get_red(this_img))
green_c = blur_img(get_green(this_img))
blue_c = blur_img(get_blue(this_img))
rm = red_mask(red_c, green_c, blue_c)
bm = blue_mask(red_c, green_c, blue_c)
gm = green_mask(red_c, green_c, blue_c)
ym = yellow_mask(red_c, green_c, blue_c)
return rm, bm, gm, ym
def feature_centre(img_mask):
img_lbl, img_features = scipy.ndimage.label(img_mask)
img_com = scipy.ndimage.center_of_mass(img_mask,
img_lbl,
list(range(1, img_features+1)))
return img_com
centre_file = os.path.join(os.getenv("TEST_DATA"), 'actual', 'scene19_160_120.jpg')
single_img = imageio.imread(centre_file)
# Get object locations
redm, bluem, greenm, yellowm = process_image(single_img)
red_com = feature_centre(redm)
grn_com = feature_centre(greenm)
blue_com = feature_centre(bluem)
yel_com = feature_centre(yellowm)
# Display information for debug
cvzero_img = np.zeros(single_img.shape, dtype=int)
cvzero_img[redm==True] = [255, 0, 0]
cvzero_img[greenm==True] = [0, 255, 0]
cvzero_img[yellowm==True] = [255, 255, 0]
cvzero_img[bluem==True] = [0, 0, 255]
print('red features', len(red_com))
print('red Centre of Mass', red_com)
print('yellow features', len(yel_com))
print('yellow Centre of Mass', yel_com)
f, ax = plt.subplots(1, 2, figsize=(12,12))
ax[0].imshow(single_img)
ax[1].imshow(cvzero_img)
for this_com in [red_com, grn_com, blue_com, yel_com]:
for this_loc in range(len(this_com)):
ax[1].scatter(this_com[this_loc][1], this_com[this_loc][0], s=160, c='C0', marker='+')
plt.show()
